For this week, I want to turn my Roomba into my camera man. Similar to remote cameras that they use in TV studios, the roomba would move according to my preplanned path.

Wiring
By taking out the lit off the roomba, you will find a PS/2 like cable. We will be using this to communicate with the roomba.



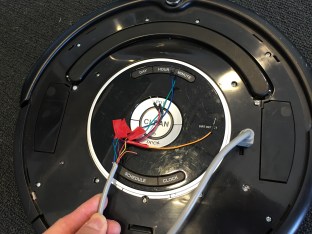

Important: The Yun does not have built in voltage regulator, so be sure to have an external one. The roomba’s power cable provides 16V. If you are using Arduino UNO, you don’t need to worry about this.
Roomba – Arduino
GNG – GND
Vpwr 16V – Vin (regulate to 5v if using Arduino Yun )
RXD – TX / Digital Pin 10 (We are using software serial )
TXD – RX / Digital Pin 11 (We are using software serial )

Code
Note: The Roomba Default Baud Rate is 115200. You can change it to 19200 by powering on Roomba, hold down the Clean/Power button. After about 10 seconds, Roomba plays a tune of descending pitches. Roomba will communicate at 19200 baud until the power is turned off, the battery is removed and reinserted, the battery voltage falls below the minimum required for processor operation, or the baud rate is explicitly changed by way of the OI.
Try 19200 if 115200 doesn’t work, you might be accidentally set the Baud Rate to 19200.
//hex table http://hextodecimal.com/index.php?hex=C8
#include
int rxPin = 10;
int txPin = 11;
int ledPin = 13;
SoftwareSerial Roomba(rxPin,txPin);
#define bumpright (sensorbytes[0] & 0x01)
#define bumpleft (sensorbytes[0] & 0x02)
void setup() {
pinMode(ledPin, OUTPUT); // sets the pins as output
Serial.begin(19200);
Roomba.begin(19200);
// 115200 is the default, but I want to use 19200 in this case
/*When powering on Roomba,
hold down the Clean/Power button.
After about 10 seconds, Roomba plays a tune of descending pitches.
Roomba will communicate at 19200 baud until the power is turned off,
the battery is removed and reinserted,
the battery voltage falls below the minimum required for processor operation,
or the baud rate is explicitly changed by way of the OI.
*/
digitalWrite(ledPin, HIGH); // say we're alive
Serial.println ("Sending start command...");
delay (1000);
// set up ROI to receive commands
Roomba.write(128); // START
delay(150);
Serial.println ("Sending Safe Mode command...");
delay (1000);
Roomba.write(131); // CONTROL
delay(150);
digitalWrite(ledPin, LOW); // say we've finished setup
Serial.println ("Ready to go!");
delay (500);
}
void loop() {
// goBackward();
//delay(100);
halt();
delay(800);
goForwardSlow(50);
delay (5000);
halt();
delay(500);
while(1) { } // Stop program
}
void goForward() {
Roomba.write(137); // Roomba's DRIVE command
Roomba.write((byte)0x00); // Velocity high byte, HEX 00
Roomba.write(100); // Velocity low byte, HEX C8 (00C8=200mm/sec)
Roomba.write(0x80); // Radius high byte, HEX 80
Roomba.write((byte)0x00); // Radius low byte, HEX 00 (8000=straight)
}
void goForwardSlow(int travelSpeed) {
Roomba.write(137); // Roomba's DRIVE command
Roomba.write((byte)0x00); // Velocity high byte, HEX 00
Roomba.write((travelSpeed, HEX)); // Velocity low byte, HEX C8 (00C8=200mm/sec)
Roomba.write(0x80); // Radius high byte, HEX 80
Roomba.write((byte)0x00); // Radius low byte, HEX 00 (8000=straight)
}
void goBackward() {
Roomba.write(137); // DRIVE
Roomba.write(0xff); // 0xff38 == -200
Roomba.write(0x38);
Roomba.write(0x80);
Roomba.write((byte)0x00);
}
void halt(){
byte j = 0x00;
Roomba.write(137);
Roomba.write(j);
Roomba.write(j);
Roomba.write(j);
Roomba.write(j);
}
void spinLeft() {
Roomba.write(137); // Roomba's DRIVE command
Roomba.write((byte)0x00);
Roomba.write(0xc8); // Velocity of spin 00C8 = 200 mm/sec
Roomba.write((byte)0x00);
Roomba.write(0x01); // Radius 0001 = spin left
}
void spinRight() {
Roomba.write(137); // Roomba's DRIVE command
Roomba.write((byte)0x00);
Roomba.write(0xc8); // Velocity of spin 00C8 = 200 mm/sec
Roomba.write(0xff);
Roomba.write(0xff); // Radius FFFF = spin right
}
You can look up the hex table here
//hex table http://hextodecimal.com/index.php
or cover the hex using this
Roomba.write((TheNumber, HEX));
Result
https://www.youtube.com/watch?v=fPOMCAYG_TY
http://youtu.be/kyc2OPdQVcM